






This script requires install of the servoblaster program. Please install it into your “pi” home directory as they describe on the servoblaster page.
I used the Adafruit Pan/Tilt servo motor kit and the Miniarduino servo motor kit. They are very similar. If yours needs to be put together, use the Adafruit Tutorial on how to build servos.
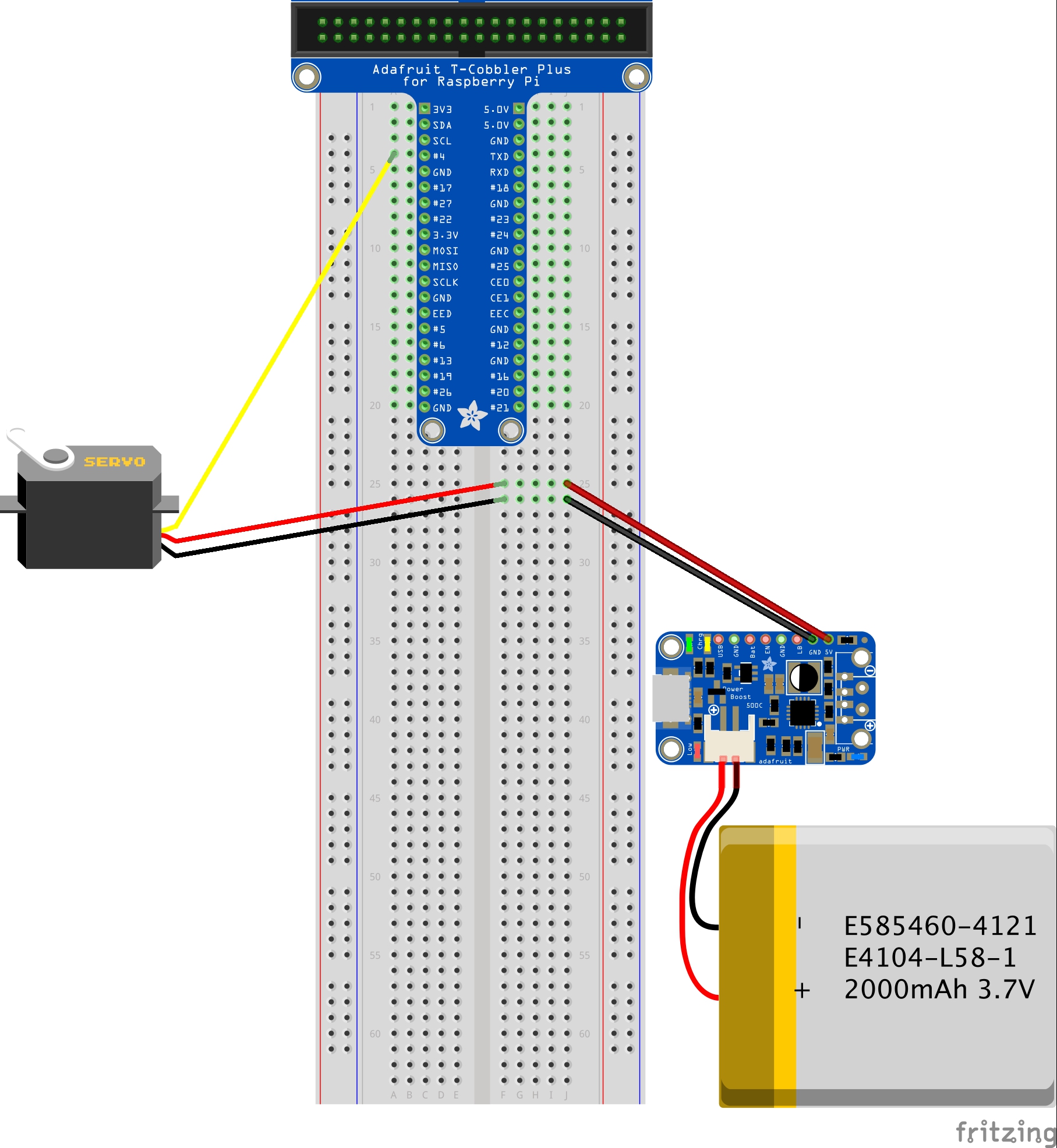
Servos take more power than the Raspberry Pi can deliver without causing errors, so I run a battery to power it separately. In the pictures you will see an inland battery from micro center, but in my diagrams I used adafruit parts… because they are available in the diagram software. Score one for the supplier who knows their makers and makes diagram software models!
This diagram is -close- to what I used, instead it has common and available adafruit parts like the LiPo Controller, Pi Cobbler, and the Servo because that’s what I found in the diagram program “Fritzring” – the standard in these things. I use servo #0 – which according to the documentation at servo blaster is the same as GPIO #4 which is pin #7 on the Pi Header / Cobbler.
Here is the code :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 |
#!/usr/bin/python #import libraries import os import time # Start the servo motors os.system('sudo /home/pi/PiBits/ServoBlaster/user/servod') # turn servo 0 to 10% position os.system("echo 0=10% > /dev/servoblaster") time.sleep(0.5) # turn servo 0 to 60% position os.system("echo 0=60% > /dev/servoblaster") time.sleep(2) os.system("echo 0=10% > /dev/servoblaster") time.sleep(0.5) # turn servo 0 to 10% position # Stop the servo motors os.system('sudo killall servod') |
This script has been tested only on a Raspberry Pi 3 computer.
Please report any tests or improvements in the comments box at the bottom of this page.
This is a part of the 2017 Rock, Paper, Lasers Science Project.
Here’s a quick video of it in action :
2017 Rock Paper Laser, Part 1 of 5



Pingback: Tales of a 6th Grade Maker: Tribulations of a Laser Cutting Science Fair Project | Make: